
La meccanizzazione di frontiera: robotizzazione della raccolta
Per molti prodotti ortofrutticoli da consumo fresco, la raccolta viene eseguita ancora esclusivamente a mano, per salvaguardarne al meglio le qualità organolettiche e soprattutto la serbevolezza. Anche se con una certa lentezza, la robotica inizia però a proporre interessanti soluzioni alternative
Nelle colture orticole e frutticole, praticate sia in apprestamenti protetti che in pieno campo, i trattamenti fitosanitari, la raccolta e talvolta le potature sono le lavorazioni maggiormente onerose in termini economici, sostanzialmente a causa del fabbisogno di manodopera.
Per ciò che concerne in particolare la raccolta, se il prodotto da raccogliere è destinato alla trasformazione (ad esempio l’uva in vino, le olive in olio, la frutta nei succhi) la meccanizzazione relativa ha fatto passi da gigante, ed è possibile affermare che nella gran parte dei casi i parametri quantitativi e qualitativi ottenibili sono più che soddisfacenti.
Viceversa, se il prodotto è destinato al consumo fresco, le cose cambiano radicalmente e, a parte sporadiche eccezioni, l’intervento manuale è ancora ampiamente generalizzato.
La più logica evoluzione di questa operazione riguarda la robotizzazione della raccolta, una sfida nella quale ci si sta cimentando da diverso tempo, a livello globale. Si tratta, in generale, di riprodurre al meglio ciò che l’essere umano è agevolmente in grado di fare, ovvero: individuare, discriminare, distaccare, manipolare, stoccare.
Il cogliere un frutto o un ortaggio maturi da un albero o da una pianta sembra un’operazione semplice, letteralmente alla portata anche di un bambino, ma tale gesto riprodotto da una macchina (ovvero il robot) richiede una tecnologia avanzatissima e sofisticatissima, che pur in sviluppo da diversi decenni non ha ancora raggiunto un livello di affidabilità ed efficienza tali da poter essere utilmente considerata come sostitutiva dell’intervento umano.
In altri campi, ad esempio quello industriale, la robotica si è ormai affermata come una validissima alternativa all’uomo nell’esecuzione di operazioni ripetitive e gravose, svolte però in condizioni estremamente controllate; quando si passa però all’ “en plein air” la questione si complica, talvolta non di poco…
Individuare il prodotto sulla pianta
La gran parte degli organismi vegetali è formata da diverse parti ipogee (sotto al livello del terreno) ed epigee (al di sopra del suolo). Se si restringe l’esame alla colture arboree, ci sono tronco e rami, e poi foglie, fiori, frutti. è necessario quindi individuare i frutti all’interno di una massa vegetale variegata, dove spesso specialmente le foglie possono nascondere e schermare l’oggetto della raccolta. Le tecniche di individuazione dei frutti fanno spesso riferimento alla loro forma e dimensioni tipiche, e si basano su algoritmi specifici, sempre più di sovente supportati dall’applicazione dell’intelligenza artificiale, che nel caso specifico “apprende” dall’esperienza pregressa per percepire con sempre maggior prontezza e precisione l’obiettivo sul quale intervenire.
Le modalità di individuazione dei frutti (o degli ortaggi) sono varie, ma fanno sostanzialmente riferimento alle tecniche di visione (spesso in 3D, e talvolta con uso di ultrasuoni) e sono in grado di capire la differenza tra il “frutto” e il resto della vegetazione.
Un ottimo supporto alla più efficiente individuazione dei prodotti della raccolta robotizzata può essere fornito dall’adattamento della coltura, ovvero la possibilità di concentrare il più possibile la zona produttiva, ad esempio tramite opportune potature (per quelle specie che ben si adattano) e/o con interventi di natura chimica o più spesso fisica di defogliazione, in grado di sgombrare da “ostacoli” la zona dove è collocato il frutto.
Valutare il grado di maturazione
Un’ulteriore complicazione nella raccolta dei prodotti orto-frutticoli destinati al consumo fresco riguarda la valutazione del corretto grado di maturazione. Se dal punto di vista prettamente umano si tratta di una considerazione quasi scontata, dato che di basa non solo sull’osservazione del colore del frutto, ma ad esempio anche sulla percezione tattile della consistenza della sua polpa, con il robot tutto ciò diventa notevolmente più complicato, considerando le varie e spesso mutevoli condizioni di illuminazione diurna, un parametro significativamente critico in condizioni di pieno campo.
Ovvio poi che la valutazione tattile della consistenza con il robot è impossibile da perseguire (si pensi ad esempio alle fragole…), dato che potrebbe essere facilmente compromessa la serbevolezza del frutto.
Dovendo quindi basilarmente discriminare il livello di maturazione del frutto solo sul suo colore (e talvolta sulle sue sfumature), diventa giocoforza fondamentale poter contare su sorgenti di luce costanti in intensità e standardizzate nella componente cromatica, che tra l’altro devono essere poco o idealmente per nulla condizionabili dall’illuminazione naturale.
Ulteriore complicazione riguarda quei frutti la cui superficie esterna non è uniforme sia come colore che come intensità di ogni singola tinta cromatica (classico esempio il pomodoro in parte rosso e in parte verde): in tal caso, è fondamentale stabilire con algoritmi specifici diverse soglie di discriminazione, grazie ai quali decidere se cogliere o meno il frutto.
Anche in questo caso, la ricerca agronomica può essere di notevole aiuto, selezionando quelle cultivar che oltre a caratteristiche organolettiche desiderabili possano evidenziare una maturazione il più possibile contestuale, combinata con un aspetto colorimetrico esterno al massimo grado di omogeneità.
Distaccare, manipolare e stoccare il prodotto
Dopo aver individuato con sicurezza l’”oggetto”sul quale intervenire, occorre agire meccanicamente, separando il frutto o l’ortaggio dalla pianta, con il duplice obiettivo di preservare le migliori condizioni di entrambi.
Per queste fasi, le tecniche messe a punto si sono necessariamente differenziate in base alle caratteristiche fisiche dei frutti, ma tutte sostanzialmente fanno riferimento a bracci meccanici più o meno sofisticati, azionati elettricamente, idraulicamente o pneumaticamente.
Ciò che fa riscontrare notevoli differenze è l’attrezzo finale, ovvero ciò che fisicamente viene a contatto con il prodotto, per il quale la conformazione, la superficie e i movimenti devono essere finalizzati ad evitare al massimo livello qualsiasi trauma.
Non è infine da sottovalutare la fase di stoccaggio (temporaneo) che deve privilegiare la massima delicatezza ad esempio nella caduta del frutto o dell’ortaggio nel contenitore di raccolta provvisoria. Sembrerebbe una questione risibile, ma ciò può condizionare non poco la tempistica della routine, considerando anche che si tratta di singoli movimenti ripetuti parecchie migliaia di volte.
Le performance del veicolo
Sono numerose le realizzazioni attuali di robot di raccolta di frutti e ortaggi, concentrate in particolare su produzioni di larga scala, come mele, agrumi, pomodori, fragole, ecc.
La discriminante sotto questo punto di vista non è tanto il prodotto da raccogliere, quanto piuttosto se l’areale di intervento riguarda una coltivazione protetta oppure il campo aperto.
Nel primo caso, infatti, il robot si muove solitamente su percorsi ben individuati e predefiniti, soprattutto sempre uguali nello spazio e nel tempo. Altra questione, ben più complessa, è la movimentazione del veicolo robotizzato in pieno campo, dove oltre alla variabilità della vegetazione bisogna fare i conti con le irregolarità e la mutevolezza della superficie di transito del veicolo.
Le soluzioni adottate sono quanto mai varie, e vanno dalla classica operatrice trainata dal trattore, al veicolo semovente basato su ruote pneumatiche o su cingoli (spesso in gomma) come organi di propulsione, oppure su macchine mutuate dal settore industriale, quali ad esempio le piattaforme elevabili.
Quella che segue è una rapida (e certamente non esaustiva) rassegna delle più recenti realizzazioni, la maggior parte delle quali è ancora allo stadio di prototipo.
Metomotion
L’israeliana Metomotion ha messo a punto un robot autonomo per la raccolta di pomodorini per consumo fresco coltivati in serra (Greenhouse Robotic Worker - GRoW), basato su un veicolo a 4 ruote con guida autonoma, dotato di due bracci robotici, un sistema evoluto di visione e individuazione delle bacche mature da raccogliere nonché un’originale soluzione (anch’essa meccanica) di raccolta del prodotto. In pratica, l’attrezzo terminale del braccio è un meccanismo a pantografo che opera nel piano orizzontale, individua il grappolo con le bacche, si posiziona a livello del peduncolo e stringendo il pantografo lo tende delicatamente verso il corpo macchina tagliandolo e afferrandolo, per poi deporlo su un nastro trasportatore, che lo convoglia nella tramoggia di stoccaggio.
I costruttori affermano che il GRoW riduce il danneggiamento dei pomodorini rispetto alla raccolta manuale, incrementando al contempo l’efficienza di raccolta. Circa i costi, prevedono che con un solo operatore si potrebbero controllare fino a 5 robot contemporaneamente, con una riduzione sino al 50% del costo di raccolta manuale.
Tra l’altro, il robot della Metomotion si può adattare per la raccolta di altri ortaggi, ma anche ad altre operazioni colturali, come la potatura, l’impollinazione e il monitoraggio della coltivazione.
Agrobot
Gli spagnoli di Agrobot hanno costruito il SW6010, un robot basato su un “gantry” (ovvero un veicolo a portale dotato di pneumatici) designato per la raccolta delle fragole da consumo fresco, sia in campo che in apprestamenti protetti.
Le fragole sono frutti molto delicati: la loro raccolta, a differenza di mele e banane, deve avvenire quando sono perfettamente mature. Anche la minima pressione esercitata sui frutti innesca un processo di deterioramento che le rende non commerciabili.
Per questo, per proteggerli da pressioni eccessive o cadute, i frutti (che per loro natura sono penduli rispetto al fogliame, quindi facilmente intercettabili) vengono separati dagli steli con un attrezzo a pinza dotato di due lame affilate, che dopo aver prelevato la singola fragola la depongono su un nastro trasportatore diretto all’area di confezionamento.
Una numerosa serie di bracci robotici controllano le interazioni di lame e cestelli con i frutti, mentre un sofisticato sistema di visione basato su telecamere analizza singolarmente ciascun frutto, esaminandone forma e colore ed attivandone il prelievo, se viene considerato maturo.
Per l’operatività in campo, la macchina è dotata di un controllo del movimento basato su sensori a ultrasuoni, che oltre a impedire ogni contatto fra il braccio e il terreno garantiscono anche un’adeguata distanza di sicurezza dalla vegetazione, assicurando in tal modo la corretta traiettoria tra le file della coltura. Il tutto è ulteriormente assistito da un sensore induttivo di misurazione angolare della posizione assoluta, che interviene in continuo sul dispositivo di sterzo.
FFRobot
Sempre da Israele la FFRobotics propone un robot per la raccolta delle mele, dove l’identificazione dei frutti da raccogliere è basata, come in numerosi altri casi, su un sofisticato sistema di visione a servizio di evoluti algoritmi per l’individuazione dei frutti maturi, ma anche di quelli non idonei, perché danneggiati.
Il robot, installato su un’operatrice trainata da un trattore, preleva la singola mela tramite un braccio a movimento lineare, all’estremità del quale è collocata una pinza a 3 dita, che dalla posizione di massima apertura afferra delicatamente il frutto, facendogli poi eseguire una rotazione di 90°, in modo da provocare il distacco del picciolo. Successivamente, le mele vengono deposte su un nastro trasportatore dotato di singoli alloggiamenti, e quindi convogliate nella cesta di raccolta.
Anche in relazione alla tipologia di allevamento delle piante, il robot è in grado tipicamente di raccogliere fino all’80-90% dei frutti, poiché non riesce al momento a rilevare quelli completamente nascosti dal fogliame o dai rami.
L’evoluzione del robot vedrà un suo adattamento per la raccolta di pesche e di limoni, in modo da ampliare il periodo di impiego annuale, così da abbattere ulteriormente i costi.
Abundant robotics
Sempre in tema di raccolta robotizzata delle mele, la californiana Abundant Robotics propone una macchina, trainata dal trattore, che si distingue dalle altre perché raccoglie i frutti “aspirandoli”. Il movimento verticale alternato del braccio robotizzato, combinato con l’avanzamento dei veicolo, effettua una scansione continua dell’intera parete del filare, in modo da individuare le mele idonee alla raccolta. Il prelievo avviene per aspirazione, avvicinando al frutto la bocca del condotto, dove viene creata una depressione. La mela viene quindi convogliata dalla corrente d’aria nella cesta di raccolta.
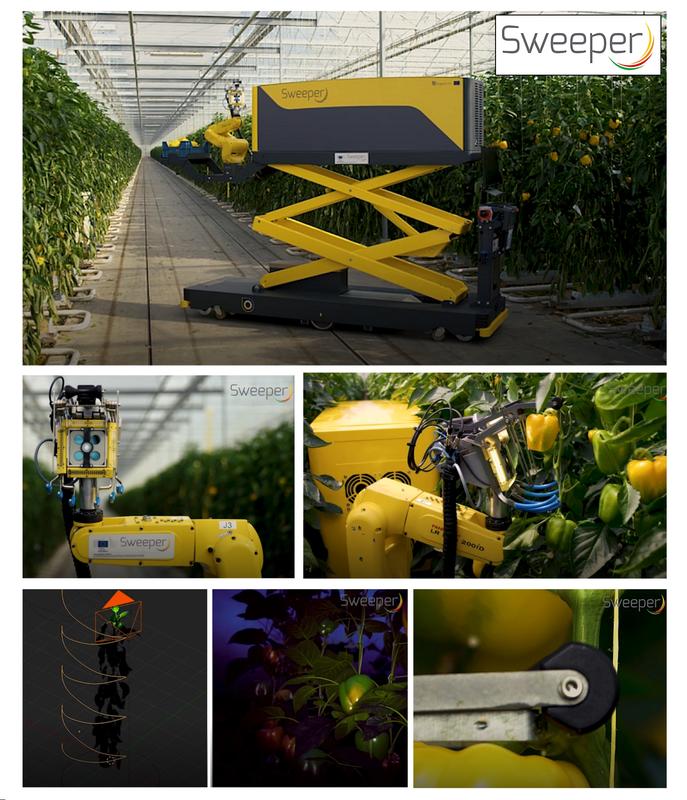
Sweeper EU
Un interessante progetto finanziato dall’Unione Europea, a cui lavorano 6 partner provenienti da Olanda, Belgio, Svezia e Israele, sta mettendo a punto lo Sweeper, un robot al momento designato alla raccolta di peperoni coltivati in serra.
Sul telaio di una piccola piattaforma elevabile a pantografo, mossa da un motore elettrico alimentato a batteria, è installato il braccio robotizzato, che comprende sia il sistema di rilevazione del prodotto, che si avvale di potenti flash a LED per rendersi indipendente dalle variazioni dell’intensità della luce naturale e poter operare anche in condizioni di oscurità, sia quello di prelievo del singolo peperone, il cui picciolo viene prima bloccato e poi tagliato con una piccola doppia lama oscillante. Il peperone cade quindi delicatamente su un supporto a dita fisse ricurve, che lo depone poi nella cassetta di raccolta, collocata a bordo dei veicolo.
Al momento il robot si caratterizza per una produttività ancora bassa: infatti in serra per la singola routine di raccolta di un peperone ci vogliono ben 24 secondi, mentre nelle condizioni controllate di laboratorio non si è comunque riusciti a scendere sotto i 15 secondi.
Considerazioni conclusive
Il panorama attuale sulla robotizzazione della raccolta dei prodotti agricoli non fa in verità presagire un’imminente massiccia sostituzione dell’intervento umano. Gli studi in questo settore di ricerca sono in atto da molti anni, ma l’impressione è che i progressi siano meno entusiasmanti di quanto si vuole far credere. È pur vero che la sensoristica (specie nei processi di visione), la meccanica di precisione e le tecniche di intelligenza artificiale hanno fatto passi da gigante, ma in ogni caso sembra di ravvisare tre ostacoli sostanziali alla diffusione di questa tecnica: la produttività dei robot non è al momento ancora pienamente concorrenziale rispetto al lavoro umano; per motivare e incrementare l’adozione dei robot, molta enfasi viene data alla possibile sostituzione della manodopera umana in una mansione così noiosa, fastidiosa e a volte gravosa, ma così facendo in alcune situazioni resterebbe il problema di impiegare diversamente le unità operative così liberate; per alcune colture e per taluni tipi di allevamento la raccolta robotizzata non fornisce ancora i risultati dell’intervento umano, specie per ciò che concerne la discriminazione del prodotto non idoneo alla raccolta e per l’effettivo prelievo di quei frutti di difficoltoso raggiungimento.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}