
Le tecnologie di navigazione autonoma dei robot rasaerba
I robot rasaerba sono macchine sicure e sostenibili che stanno conquistando crescenti quote di mercato. Grazie alla tecnologia Real-Time Kinematic (RTK), che sfrutta le reti dinamiche del sistema satellitare di navigazione, queste macchine sono in grado di lavorare in modo autonomo
Nel variegato panorama della robotica agricola e del giardinaggio stanno guadagnando sempre più spazio e visibilità i robot rasaerba autonomi. La loro diffusione, strettamente connessa a numerosi vantaggi in termini di tempo ed efficienza, riesce a garantire una maggiore sicurezza degli operatori e un maggiore rispetto dell’ambiente.
La presenza di queste macchine, alimentate a batteria, è in linea con la crescente attenzione verso la sostenibilità ambientale, perché consente l’utilizzo di meno fonti fossili, la riduzione delle emissioni di anidride carbonica e di gas serra. La crescente diffusione dei robot rasaerba è confermata anche dalle analisi di mercato delle macchine agricole e delle attrezzature per il giardinaggio relative al primo semestre del 2023 (basate sui dati forniti dall’associazione costruttori Comagarden) che a fronte di una flessione del comparto hanno evidenziato un significativo trend incrementale delle vendite (+13%). Tenendo presente tutti gli aspetti sopraelencati risulta naturale per molti operatori del verde rivolgere l’attenzione al segmento dei robot rasaerba, che ad oggi sono macchine performanti e sempre più efficienti, in grado di gestire sia piccoli giardini sia spazi più ampi. Dotati di un sistema di autoricarica della batteria, queste macchine sono programmate per gestire in modo quasi completamente autonomo il taglio del prato, eccezion fatta per le sole operazioni di programmazione e manutenzione da parte dell’uomo.
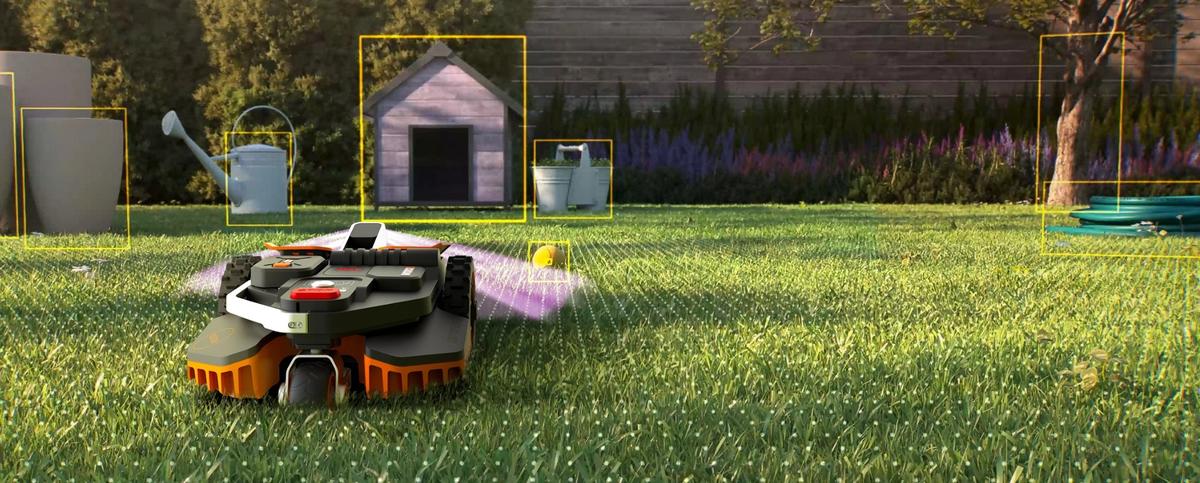
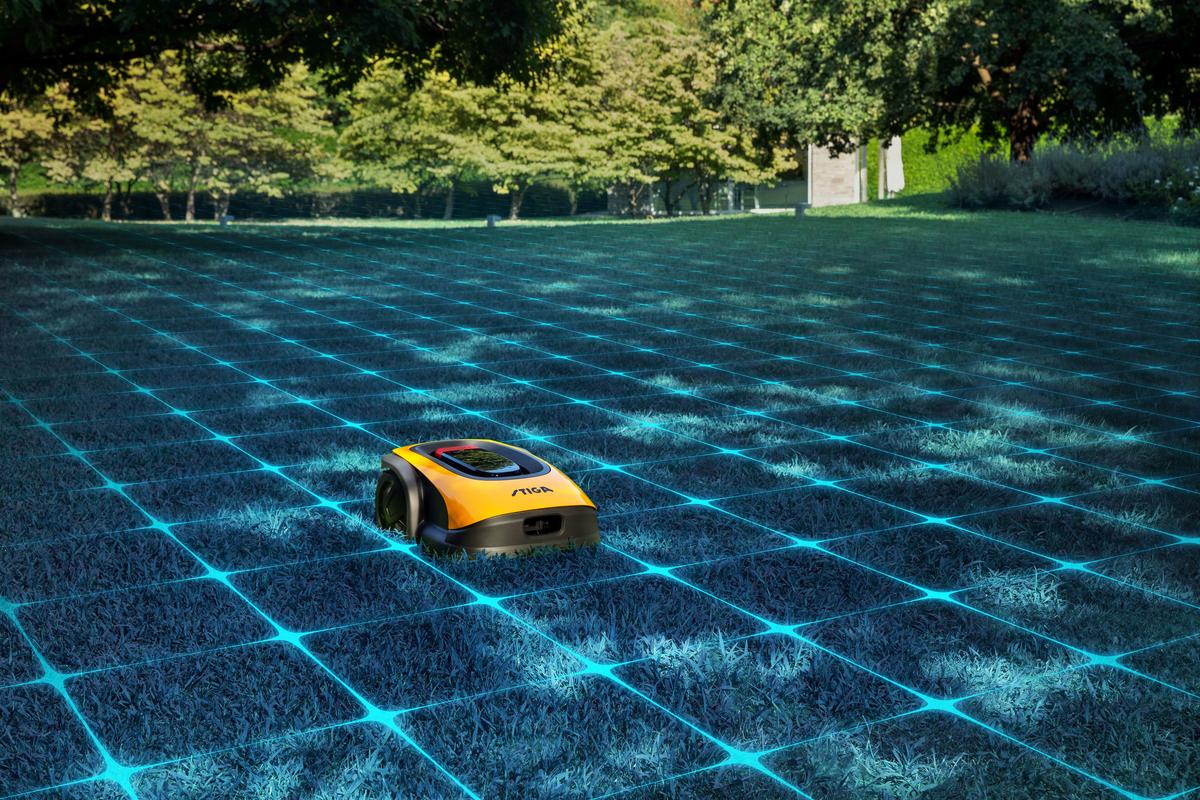
I robot si caratterizzano inoltre per le avanzate capacità di navigazione autonoma, concepite per garantire una precisione e una qualità superiore durante l’attività di taglio: infatti, la presenza di una sensoristica all’avanguardia permette loro di percepire l’ambiente circostante e le mutevoli condizioni del terreno. La sensoristica base di queste macchine consiste nei sensori di sollevamento, inclinazione e ultrasuoni, attraverso i quali riescono ad adattarsi alle esigenze specifiche di ogni contesto. Al di là dei diversi tipi di modelli proposti dai costruttori, i robot rasaerba condividono una serie di caratteristiche fondamentali, tra cui un sistema di taglio avanzato con lame pivottanti, che offrono la possibilità di praticare il mulching e di regolare la larghezza di taglio per ottenere risultati precisi e impeccabili, il mantenendo un livello di rumore contenuto, compreso tra 58 e 72 decibel. Dal punto di vista energetico, essi sono altamente efficienti, con un consumo che varia da 5 a 130 kilowattora al mese in condizioni di massimo utilizzo. Nonostante prestazioni di alto livello, i rasaerba autonomi presentano un peso relativamente contenuto, oscillando tra i 5 e i 72 chilogrammi, il che minimizza il compattamento del terreno. Inoltre, mostrano una notevole capacità di manovra, gestendo con agilità e precisione passaggi stretti, e possono operare su pendenze elevate, raggiungendo un massimo del 70% all'interno dell'area di lavoro e del 50% in prossimità del cavo perimetrale o virtuale. A parte queste caratteristiche comuni, i differenti robot rasaerba si differenziano per la specifica tipologia di impiego cui sono destinati: alcuni modelli sono progettati per la manutenzione di aree verdi ordinarie e ornamentali, mentre altri sono pensati per utilizzi professionali più intensivi. Versatili e flessibili, essi coprono un'ampia gamma di aree di lavoro, che vanno da dimensioni ridotte, inferiori a 250 metri quadrati, a spazi di grandi dimensioni, fino a 75.000 metri quadrati. Infine, presentano diverse modalità di navigazione, che possono essere randomiche, sistematiche (con pattern diversificati) o una combinazione di entrambe, per adattarsi alle esigenze specifiche di ogni contesto. La tecnologia di posizionamento che sino ad oggi si è rivelata più efficace per garantire la precisione delle traiettorie dei robot è la Real-Time Kinematic (RTK). Questo sistema di tracciamento sfrutta reti dinamiche del sistema satellitare globale di navigazione fornendo una precisione nell’ordine del centimetro. È un sistema di correzione differenziale cinematica in tempo reale che sfrutta come segnale di correzione quello inviato al ricevitore da una stazione di base, posta al massimo a qualche chilometro di distanza dal punto in cui si sta operando. Il sistema RTK può essere composto o da una coppia di ricevitori o da una rete di stazioni permanenti. Nel primo caso si hanno a disposizione una coppia di ricevitori, la base, posta in un punto di coordinate note, e un rover mobile. Nel secondo caso, invece, c’è solo bisogno di un rover che riceve la correzione da una rete di stazioni permanenti, di solito con un telefono connesso alla rete che acquisisce la correzione con un preciso protocollo di comunicazione. Il limite maggiore di questa tecnologia che può influenzare negativamente il grado di precisione del posizionamento satellitare è la presenza di alberi, edifici, cielo coperto. Il problema può essere oggi superato con metodi alternativi tra cui la navigazione odometrica e inerziale,e tecnologie come la VisionFence dei rasaerba Segway Navimow.
Queste macchine utilizzano un modulo di posizionamento Exact Fusion Locating System in combinazione con la RTK. Il sistema VisionFence Sensor, invece, è una tecnologia basata su un avanzato algoritmo di riconoscimento visivo che permette al robot di individuare ostacoli senza considerarli zone "vietate" e di risolvere problemi di scarso segnale individuando il bordo del giardino e consentendo di continuare a tagliare. Un'altra tecnologia che aumenta l’efficienza dei sistemi RTK è la tecnologia Active Guidance System (AGS), adottata dai robot rasaserba STIGA. L’AGS permette una pianificazione ancora più intelligente del taglio in ogni area del giardino evitando sovrapposizioni o aree trascurate, un margine di errore massimo di 2 cm e un segnale stabile, con comunicazione costante con la stazione di riferimento del robot.








{kind=link}
{kind=link}
{kind=link}
{kind=link}