
Dall'automotive all'agricoltura, le applicazioni del sistema Ethernet
La tecnologia di controllo delle funzioni da postazione remota deriva dall'automotive ma può trovare importanti applicazioni nella meccanica agricola. Al pari di quanto accade nell'automotive, anche in agricoltura l'utilizzo di telecamere digitali può migliorare la qualità del lavoro e il controllo delle procedure, con ricadute positive anche in termini di sicurezza
In un’automobile quanto in una macchina agricola, la rete Ethernet non è esattamente un componente che i clienti chiederanno mai come optional, né d’altro canto sarà mai menzionato come tale nelle brochure pubblicitarie dei concessionari. È quindi difficile giustificare l’immane sforzo, dal punto di vista dei costi, del cambio di paradigma dalle altre reti veicolari (CAN, FlexRay, LIN, ecc.), di acquisizione know-how tecnologico, degli aspetti di sicurezza, dei vincoli sulle architetture hardware e software dei nodi che questa tecnologia ha imposto sulle case costruttrici dell’automotive nell’ultimo lustro. Se non fosse per la quantità e l’innovatività dei casi d’uso che Ethernet porta con sé; basti pensare ai molti sistemi avanzati di guida assistita (ADAS) che possiamo trovare su segmenti di mercato anche di fascia media, un esempio tra tutti il “Collision avoidance system”, e l’infotainment, inteso come l’unione di dati informativi al guidatore e ai passeggeri e l’intrattenimento per i passeggeri, con la trasmissione simultanea da più sorgenti di contenuti multimediali in stretta sincronia.
Il fil-rouge che sottende questi ambiti è il bisogno sostanziale di maggior throughput, di quantità di dati trasmessi tra le unità di controllo elettroniche (ECU); il CANbus infatti, che impone il suo predominio sulle reti veicolari da decenni, con i suoi 8 byte di dati e la velocità relativamente bassa (nominalmente limitata a 2 Mbps ma comunemente più diffusa a 250 e 500 Kbps) non permette la sua applicabilità in use case dove sensoristica (es: LIDAR e RADAR), vincoli di sicurezza sulla crittazione o flussi onerosi di dati (come quelli video) impongono cifre di throughput alti. Ecco perché Ethernet (con i suoi 1500 byte di dati a messaggio e 100Mbps) sta guadagnando sempre più spazio all’interno delle reti veicolari dell’automotive e suscita un grosso interesse nell’ambito delle macchine agricole e movimento terra, mentre è una realtà assodata in comparti industriali come l’avionica e la tramviaria. Una differenza fondamentale tra le due tipologie di reti è la topologia: mentre il CANbus è notoriamente un bus fisico, assimilabile ad una piazza in cui gli avventori comunicano secondo un certo criterio di priorità, Ethernet ammette, nella stragrande maggioranza di casi, una topologia di base a punto-punto, simile alla corrispondenza tradizionale, dalla quale possono venire create conformazioni quali la stella, l’albero, l’anello logico utilizzando componenti quali gli switch.
È giusto notare che “Ethernet” è un tecnologia, risalente agli anni 80, relativamente complessa: se pensiamo alla pila ISO/OSI, IEEE standardizzò i primi due livelli (i livelli Fisico e Datalink), mantenendoli ben partizionati e indipendenti l’uno dall’altro; IETF e la comunità che è sorta al suo interno sviluppò molti dei protocolli che oggi sono parte fondante della nostra Information Technology e persino della nostra quotidianità, raccogliendoli nella Internet Protocol Suite o stack TCP/IP. Per adattarsi ai requisiti del mondo automotive, è stato creato un livello fisico ad-hoc, in termini di costo cablaggio e compatibilità elettromagnetica, conosciuto commercialmente come BroadR-Reach, standardizzato, nella versione a 100Mbit, in IEEE come 802.3bw e, recentissimamente nella versione a 1 Gbps, come 802.3bp. Entrambe le versioni si presentano in termini di cablaggio come comuni UTP (unshielded twisted pair) di rame e chip che implementano il livello fisico da diversi fornitori, quali Broadcom, NXP, Marvell e Realtek. Un’ulteriore novità è la creazione di un gruppo di interesse per una versione low-cost (competitivo con CAN e FlexRay), a throughput basso (10Mbps) e che ammetta una topologia a bus fisico. L’unica limitazione nella tecnologia BroadR-Reach è la lunghezza del cablaggio che, per motivi di conformità con gli standard automotive è stata fissata a 15 m, il che, in particolari ambiti delle macchine pesanti sia da strada sia fuoristrada, può diventare stringente, comportando l’utilizzo di ulteriori infrastrutture di rete come i repeater.
Nell’ambito agricolo, esistono già degli sforzi per recepire l’innovazione tecnologica portata dall’Automotive Ethernet nell’ambito dell’Agicultural Industry Electronics Foundation (AEF) nel PT10 (High Speed ISOBUS, HSI) dal febbraio 2014. AEF è, dall’ottobre del 2008, una piattaforma internazionale che si occupa della creazione di linee guida per la standardizzazione di ISO 11783 (ISOBUS), ma non solo. Le attività si sono spostate verso nuovi ambiti come l’elettrificazione, sistemi di telecamera, farm management information systems, comunicazione wireless su campo e HSI, appunto.
La necessità di focalizzarsi su reti di nuova generazione ha motivazioni parzialmente simili a quelle dell’automotive. Da una parte l’utilizzo di telecamere digitali può migliorare la qualità del lavoro sia associato all’efficientamento di alcune lavorazioni, in cui l’operatore è in grado di monitorarne da remoto specifiche fasi, sia per migliorare la controllabilità, in termini di sicurezza funzionale, delle procedure più delicate o vedere in punti altrimenti ciechi durante le movimentazioni; dall’altro, il controllo di alcune procedure lato attrezzo è già problematico in termini di quantità di dati comunicati, tramite CAN, tra ECU, attuatori e sensori in macchine con un alto numero di righe da gestire a numeri di cicli di controllo anche non particolarmente elevati.
Gli sforzi del PT10 per ora si sono soprattutto focalizzati su due ambiti: livello fisico e protocolli. Per quanto riguarda il livello fisico, connettoristica (la retro-compatibilità come punto essenziale) e lunghezze della rete sono i principali punti all’ordine del giorno. Dal punto di vista dei protocolli invece, lo spettro di scelte e problematiche è molto più ampio e variegato. I requisiti che stanno influenzando le scelte dal punto di vista dei protocolli sono fondamentalmente la sicurezza, come componente chiave della comunicazione tra trattore e attrezzo in un ambiente aperto e dinamico, la sicurezza funzionale, come componente fondamentale dell’architettura della nuova rete che influenza anche la latenza delle comunicazioni, che dev’essere controllata e gestita. La scelta dei protocolli da valutare come parte fondante dell’HSI si rifanno (in maniera anche guidata dall’uniformità dei tool di progettazione, simulazione e analisi) a quelli dell’automotive come SOME/IP, definito nella versione 4.1 di AUTOSAR, che realizza un protocollo orientato ai servizi di controllo; Audio Video Bridging (AVB), definito da IEEE come un insieme di protocolli per avere il cosiddetto “lip sync” (la sincronia tra video e audio), e il suo successore Time-Sensitive Network (TSN) ancora in draft, nel quale la trasmissione di dati orientati al controllo sono esplicitamente messi in scope; ISO13400, conosciuto anche come Diagnostics over IP (DoIP), per la gestione di messaggi di diagnostica (es: WWH-OBD).
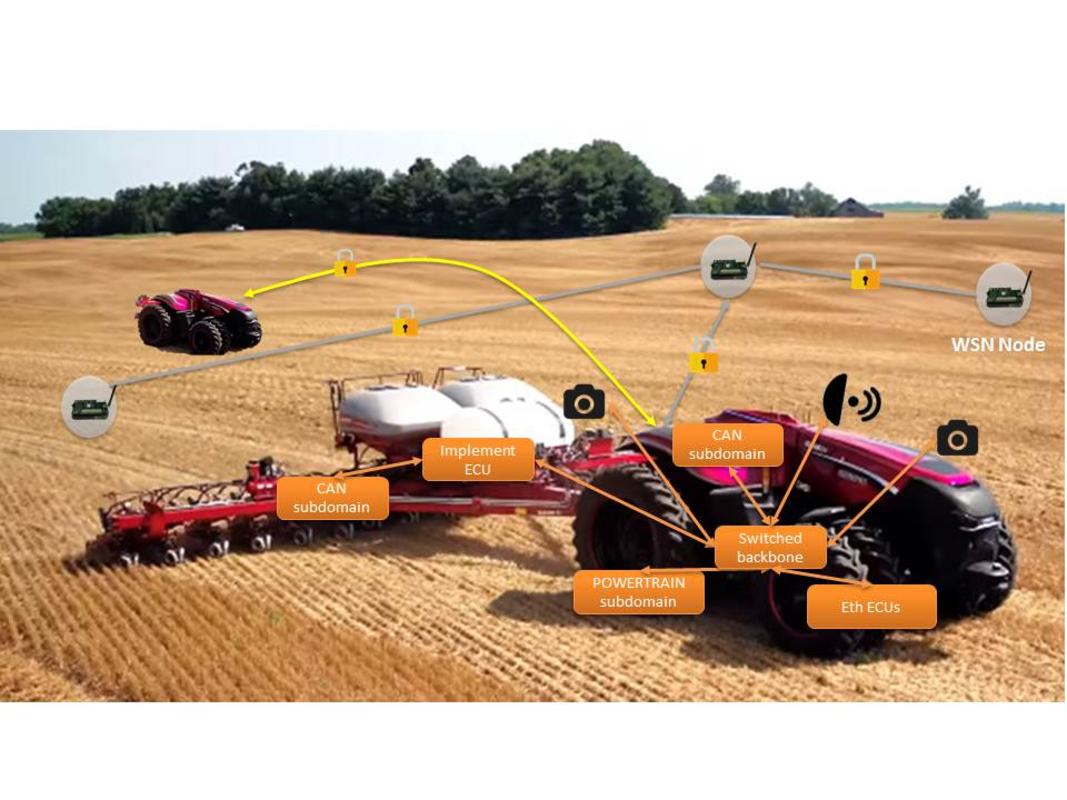
Il panorama dell’automotive Ethernet volto al mondo delle macchine agricole è ancora in fase di definizione. È certo che esistono casi d’uso che strettamente richiedono l’utilizzo di questa nuova tecnologia, non solo come nuovo stack protocollare di comunicazione standardizzato trattore/attrezzo di diversi costruttori, ma anche come una rete proprietaria (un sottodominio), fino a poter diventare in un futuro la backbone che collega diversi sottodomini, creando un sistema in cui le architetture (orientate ai servizi, cloud computing) a cui il mondo dell’IT è abituato ormai da anni. È altrettanto certo che nel futuro ulteriori casi d’uso emergeranno, basti pensare al trattore autonomo Case IH Magnum, che con il suo impatto mediatico ha ridefinito il futuro delle macchine agricole. La sensoristica per la guida autonoma di cui è equipaggiato necessita indiscutibilmente dell’Automotive Ethernet, così come per la distribuzione delle decisioni e del controllo della lavorazione. A livello globale, il successo del ruolo profilato qua da Ethernet è strettamente legato agli sforzi di standardizzazione che si stanno avendo in AEF, poiché permetteranno la definizione di best practices che potranno essere adottate o adattate dai costruttori di trattori e di implement e dalle proprie filiere di fornitura.








{kind=link}
{kind=link}